
INSTRUMENTOS
GNSS SATLAB SL700
 El receptor GNSS SATLAB SL700 es un dispositivo de alta precisión utilizado para la medición y posicionamiento satelital. Diseñado con tecnología avanzada, el receptor es capaz de recibir señales de satélites GPS, GLONAS, GALILEO y Beidou, lo que le permite proporcionar una posición precisa y confiable incluso en condiciones de señal débil o entornos difíciles.
El receptor GNSS SATLAB SL700 es un dispositivo de alta precisión utilizado para la medición y posicionamiento satelital. Diseñado con tecnología avanzada, el receptor es capaz de recibir señales de satélites GPS, GLONAS, GALILEO y Beidou, lo que le permite proporcionar una posición precisa y confiable incluso en condiciones de señal débil o entornos difíciles.
Este receptor GNSS es ideal para una amplia variedad de aplicaciones, incluyendo topografía, construcción, agricultura, minería, ingeniería civil y más. Con una pantalla LED fácil de interpretar y una interfaz de usuario intuitiva, el SATLAB SL700 es fácil de usar y ofrece una amplia gama de funciones avanzadas para satisfacer las necesidades de cualquier aplicación de medición de posición satelital.
PUNTOS DE CONTROL TERRESTRE (GCP)
 Los puntos de control terrestres (GCP) son puntos de referencia que se establecen en el terreno y se utilizan en la fotogrametría para corregir la distorsión que puede haber en las imágenes capturadas por un dron o cámara aérea. Los GCP se colocan en lugares estratégicos y se miden con equipos de medición precisos, como receptores GNSS o estaciones totales, para obtener sus coordenadas exactas en el sistema de referencia utilizado.
Los puntos de control terrestres (GCP) son puntos de referencia que se establecen en el terreno y se utilizan en la fotogrametría para corregir la distorsión que puede haber en las imágenes capturadas por un dron o cámara aérea. Los GCP se colocan en lugares estratégicos y se miden con equipos de medición precisos, como receptores GNSS o estaciones totales, para obtener sus coordenadas exactas en el sistema de referencia utilizado.
En esta ocasión, los GCP se utilizarán para comprobar la precisión de la ortofoto generada a partir de las imágenes obtenidas por el dron Marlyn Cobalt en modalidad PPK. Se comparará la posición de los GCP medidos en terreno con la posición de los mismos GCP en la ortofoto generada, de esta manera se podrá determinar cuánto error hay entre los GCP y lo que aparece en la ortofoto. Esta información será valiosa para evaluar la precisión del dron y del proceso de fotogrametría utilizado en la obtención de la ortofoto.
DRON ATMOS MARLYN COBALT:
 El Atmos Marlyn Cobalt es un don de ala fija utilizado en topografía, cartografía y fotogrametría. Con un diseño aerodinámico y un sistema de propulsión eléctrico, este dron es eficiente energéticamente prometiendo 40 minutos de vuelo. El Marlyn Cobalt puede soportar diferentes sensores ya sean RGB, Multiespectrales o Termales, lo que permite capturar datos específicos y obtener una comprensión detallada del terreno. Capaz de operar en una amplia gama de entornos, este dron es fácil de transportar y montar. Con la capacidad de vuelo autónomo, puede seguir una ruta específica y capturar datos precisos sin un piloto a bordo.
El Atmos Marlyn Cobalt es un don de ala fija utilizado en topografía, cartografía y fotogrametría. Con un diseño aerodinámico y un sistema de propulsión eléctrico, este dron es eficiente energéticamente prometiendo 40 minutos de vuelo. El Marlyn Cobalt puede soportar diferentes sensores ya sean RGB, Multiespectrales o Termales, lo que permite capturar datos específicos y obtener una comprensión detallada del terreno. Capaz de operar en una amplia gama de entornos, este dron es fácil de transportar y montar. Con la capacidad de vuelo autónomo, puede seguir una ruta específica y capturar datos precisos sin un piloto a bordo.
SENSOR SONY RX1RII
 El sensor SONY RX1RII es una cámara compacta de alta resolución que se utiliza como componente el dron Atmos Marlyn. Este sensor cuenta con un sensor CMOS de 35 mm con 42,4 mega píxeles, lo que permite capturar imágenes nítidas y detalladas en una amplia gama de condiciones de luz.
El sensor SONY RX1RII es una cámara compacta de alta resolución que se utiliza como componente el dron Atmos Marlyn. Este sensor cuenta con un sensor CMOS de 35 mm con 42,4 mega píxeles, lo que permite capturar imágenes nítidas y detalladas en una amplia gama de condiciones de luz.
El sensor SONY RX1RII está diseñado para operar en aplicaciones de topografía, cartografía y fotogrametría, ya que cuenta con un objetivo de apertura rápida de f/2.0 que permite una mayor captación de luz y una profundidad de campo más amplia. Además, el sensor cuenta con una tecnología avanzada de enfoque automático y opciones de ajuste manual, lo que permite un mayor control y personalización de la captura de imágenes.
SOFTWARE ATMOS NAVIGATOR:
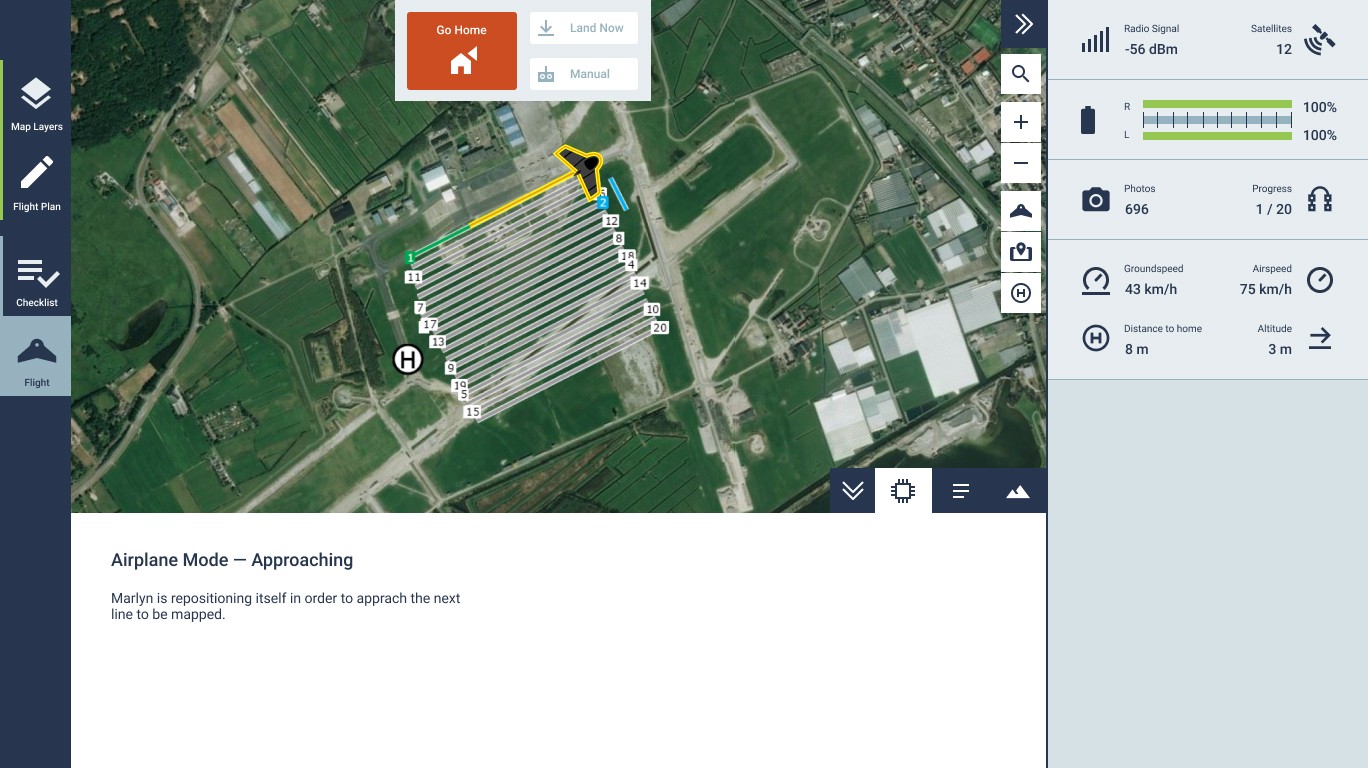 El Atmos Navigator es un software diseñado para planificar y controlar misiones de vuelo con aplicaciones de topografía, cartografía y fotogrametría. Ofrece una interfaz de usuario fácil de usar y permite a los usuarios crear misiones personalizadas para capturar imágenes precisas. Este software es una herramienta esencial para el control y la planificación de misiones de drones, ya que permite a los usuarios obtener datos precisos de manera eficiente y efectiva con el Dron Marlyn Cobalt
El Atmos Navigator es un software diseñado para planificar y controlar misiones de vuelo con aplicaciones de topografía, cartografía y fotogrametría. Ofrece una interfaz de usuario fácil de usar y permite a los usuarios crear misiones personalizadas para capturar imágenes precisas. Este software es una herramienta esencial para el control y la planificación de misiones de drones, ya que permite a los usuarios obtener datos precisos de manera eficiente y efectiva con el Dron Marlyn Cobalt
SOFTWARE ATMOS GEOTAGGER V2:
 El software Geotagger V2 de Atmos es una herramienta de georreferenciación de imágenes capturados por Marlyn Cobalt que sincroniza y ajusta la posición GPS de las imágenes para generar mapas y modelos 3D precisos. La aplicación importa imágenes y archivos de registro GPS de la misión, sincroniza las imágenes con los datos de posición GPS y georreferencia cada imagen de manera precisa en función de su posición y orientación. Además, permite procesar grandes cantidades de datos de manera eficiente y ofrece una vista previa de las imágenes procesadas y la opción de exportarlas a otros programas de software de procesamiento y análisis. Es por esto que el software Geotagger v2 es una herramienta crucial para la gestión de datos de drones y para generar resultados precisos en aplicaciones de topografía, cartografía y fotogrametría.
El software Geotagger V2 de Atmos es una herramienta de georreferenciación de imágenes capturados por Marlyn Cobalt que sincroniza y ajusta la posición GPS de las imágenes para generar mapas y modelos 3D precisos. La aplicación importa imágenes y archivos de registro GPS de la misión, sincroniza las imágenes con los datos de posición GPS y georreferencia cada imagen de manera precisa en función de su posición y orientación. Además, permite procesar grandes cantidades de datos de manera eficiente y ofrece una vista previa de las imágenes procesadas y la opción de exportarlas a otros programas de software de procesamiento y análisis. Es por esto que el software Geotagger v2 es una herramienta crucial para la gestión de datos de drones y para generar resultados precisos en aplicaciones de topografía, cartografía y fotogrametría.
SOFTWARE AGISOFT METASHAPE:
 Agisoft Metashape es un software de fotogrametría utilizado para crear ortofotos precisas en topografía y cartografía. El software procesa imágenes digitales para crear un modelo 3D preciso del terreno y, a partir de este modelo, genera un ortomosaico georreferenciado que puede utilizarse para la planificación de proyectos y el análisis de características topográficas. Además, el software ofrece herramientas para procesamiento y análisis de datos, mediciones y generación de informes. Agisoft Metashape es una herramienta crucial en la creación de orto fotos precisas para topografía y cartografía, con la capacidad de procesar y analizar datos para obtener resultados detallados y precisos.
Agisoft Metashape es un software de fotogrametría utilizado para crear ortofotos precisas en topografía y cartografía. El software procesa imágenes digitales para crear un modelo 3D preciso del terreno y, a partir de este modelo, genera un ortomosaico georreferenciado que puede utilizarse para la planificación de proyectos y el análisis de características topográficas. Además, el software ofrece herramientas para procesamiento y análisis de datos, mediciones y generación de informes. Agisoft Metashape es una herramienta crucial en la creación de orto fotos precisas para topografía y cartografía, con la capacidad de procesar y analizar datos para obtener resultados detallados y precisos.
OBJETIVO
El objetivo de este estudio es comprobar la precisión que se puede obtener con el Dron Marlyn Cobalt en modalidad PPK, comparando los resultados con los puntos de control terrestre (GCP) en la ortofoto generada.
DESARROLLO
En el desarrollo de este trabajo, el primer paso fue seleccionar el lugar donde se realizaría el vuelo con dron. Después de evaluar las opciones, se decidió realizar el vuelo en Laguna Caren, Santiago. Este lugar fue elegido por ser una zona extensa, amplia y alejada de la ciudad, lo que permitiría al dron desempeñarse de manera óptima, ya que le permite capturar grandes cantidades de terreno en una sola sesión. Con estas características, Laguna Caren se convirtió en la ubicación perfecta para llevar a cabo el vuelo y obtener los datos necesarios para el proyecto.
Una vez en el terreno, el primer paso consistió en trabajar con los instrumentos GNSS para capturar los puntos de control terrestres (GCP) que previamente habían sido ubicados en el lugar. Con la tecnología de los receptores GNSS utilizados, se lograron obtener coordenadas de manera precisa, con precisiones milimétricas. Para este proceso, se empleó la modalidad de RTK, la cual implica la instalación de un receptor como base en un punto conocido, y otro receptor móvil para el levantamiento de los puntos de control. Gracias a la precisión y fiabilidad de esta tecnología, se logró obtener un conjunto de puntos de control altamente preciso, lo que servirá más adelante para el control de precisión de la ortofoto que obtendremos.
Posteriormente, se procedió a colocar el dron en un lugar seguro y estable que asegurara un despegue y aterrizaje sin incidentes. En este momento, se estableció el puesto de trabajo con el computador cercano al dron para revisar los parámetros de seguridad, crear la misión de vuelo y controlar el despegue y aterrizaje del dron, todo esto gracias al software Atmos Navigator.
Una vez finalizado el vuelo del dron en terreno, se da por concluido el trabajo en campo y se procede a realizar el procesamiento de los datos obtenidos en la oficina. El primer paso es incorporar todos los datos capturados durante el vuelo, incluyendo los datos brutos del receptor GNSS Base, las imágenes capturadas por el dron y la información GNSS obtenida. Para ello se utiliza el software Atmos Geotagger V2, que permite integrar todos los datos obtenidos en un solo archivo para realizar el proceso.
 Equipo de soporte en prueba de campo con Marlyn Cobalt
Equipo de soporte en prueba de campo con Marlyn Cobalt
A continuación, se inicia el proceso de procesamiento de las imágenes, utilizando la metodología PPK (Post-Processing Kinematics) para geo etiquetar con precisión cada imagen capturada con respecto a la coordenada conocida de la Base que podemos incluir dentro del software. Este proceso permite obtener una posición precisa en el sistema X, Y y Z por cada imagen, lo que es fundamental para la creación del modelo final y la generación de futuros productos cartográficos.
El procesamiento de imágenes con PPK es una técnica que permite corregir los errores de posicionamiento que puedan surgir durante el vuelo del dron, asegurando así que las imágenes sean georreferenciadas con alta precisión. Este proceso es fundamental para lograr la calidad y precisión necesaria en la generación de la ortofoto.
Luego de haber obtenido las imágenes geo etiquetadas y corregidas, se procede a trabajar con el software Agisoft Metashape. En este programa, incorporamos las imágenes capturadas en el paso anterior para llevar a cabo el flujo de trabajo. El primer paso es realizar la orientación de las imágenes para que estas estén correctamente posicionadas.
Posteriormente, creamos la nube de puntos de paso, que consiste en un conjunto de puntos tridimensionales en el espacio que se van a utilizar para la creación de la nube de puntos densa. Esta última se encarga de crear un modelo tridimensional del terreno, obteniendo una mayor precisión en la representación del mismo.
A continuación, creamos el modelo digital de elevación, que es un modelo en tres dimensiones que representa la elevación del terreno. En este paso, se pueden identificar las zonas más altas y bajas del terreno, lo que permite una mejor comprensión de la topografía del área.
Finalmente, se genera la ortofoto, que es un modelo digital donde se representa el terreno de manera plana y corregida. Esta orto foto es de gran utilidad, ya que permite extraer medidas precisas y reales del terreno. De esta manera, se puede realizar un análisis más detallado de las características del terreno y obtener información valiosa para la toma de decisiones.
RESULTADOS
Ortofoto:
Producto generado a partir de las imágenes capturadas por el Dron Marlyn Cobalt, las cuales fueron geo etiquetadas de manera precisa por medio de la metodología PPK. Este producto fue obtenido gracias al uso del software Agisoft Metashape, y con este logramos obtener una representación de la zona de interés totalmente representativa, la cual constituye una superficie de 108 Ha.
Ortomosaico:

Ortomosaico obtenido con Marlyn Cobalt
En el producto podemos observar el tamaño del GSD el cual es de 1.3cm/px de resolución a una altura de vuelo de 100 metros sobre el terreno:

Insertando las coordenadas de los GCP en el software Agisoft Metashape podemos apreciar que la diferencia entre las coordenadas de estos y donde se ubica vértice del GCP en la Ortofoto es de 3.2 cm en promedio:

En las siguientes tablas podemos observar el error generado en el total de los 4 puntos y por cada uno de ellos respectivamente.
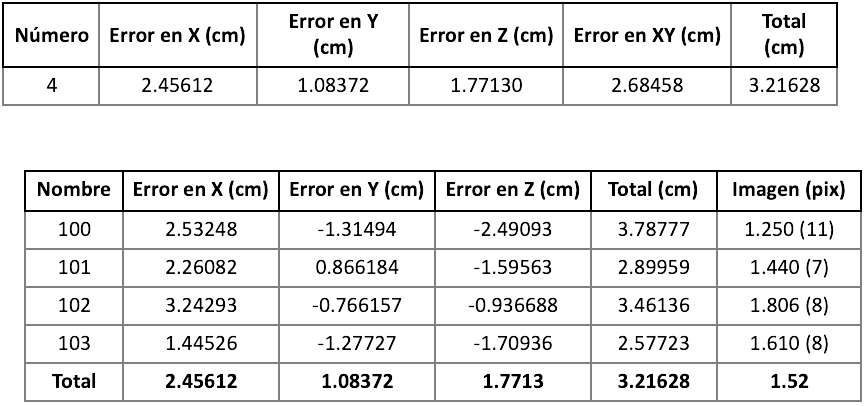
X: Este, Y: Norte, Z: Altitud.
CONCLUSIONES
Luego de llevar a cabo todo el proceso de trabajo, podemos concluir que los resultados obtenidos fueron satisfactorios. En particular, la precisión obtenida en el producto final, la ortofoto, fue realmente excelente, dado que se logró una precisión de 3 centímetros al compararla con los puntos de control terrestre (GCP) colocados. Este es un resultado muy destacable, ya que el área cubierta por el vuelo fue de 108 hectáreas y se logró esta precisión en un tiempo récord de solo 40 minutos. Esto claramente representa una gran optimización en el tiempo de trabajo en terreno.
La rapidez del vuelo se debe a que se utilizó un dron de ala fija, lo que le confiere una mejor aerodinámica. Además, la calidad de las imágenes obtenidas fue excepcional gracias al sensor SONY RX1RII que se utilizó. Esta cámara es de alta calidad, lo que permitió lograr una gran resolución en las imágenes.
Es importante destacar que este dron es muy versátil para levantar extensas zonas de trabajo, lo que lo convierte en una herramienta ideal para aplicaciones en topografía. En conclusión, el uso de esta tecnología permite mejorar significativamente el proceso de toma de datos y generando resultados precisos y confiables, lo que facilita en gran medida el trabajo de los profesionales en el campo de la topografía.